Deja, tinklo galimybės sekti zondus yra ribotos ir greitai jų nepakaks vis gausėjančiam giliojo kosmoso zondų būriui aptarnauti. Taigi ieškoma alternatyvų, kartu stengiantis kuo daugiau procedūrų atiduoti patiems zondams į manipuliatorius.
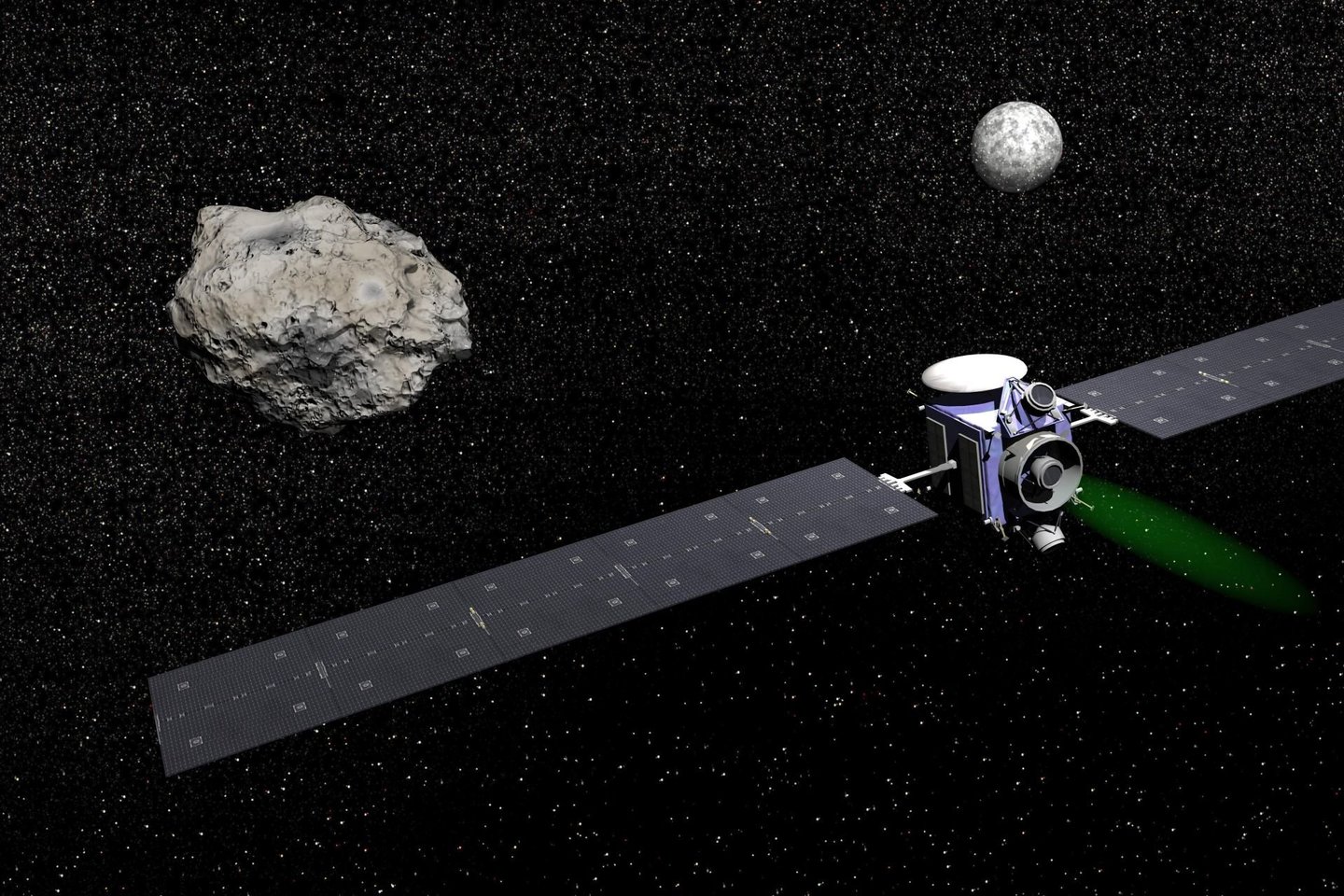
Dabar mokslininkai sukūrė autonominės navigacijos metodą, kuriam praktiškai nereikia išorinio įsikišimo. Metodas iš principo panašus į tą, kuriuo remiasi autonominių automobilių valdymo sistemos. Zonde įrengtos kameros reguliariai darytų dangaus nuotraukas ir tikrintų planetų padėtis. Žinant tikslų nuotraukos padarymo laiką, galima labai tiksliai nustatyti, kur planetos tuo metu yra trimatėje erdvėje. Tada, žinodami, kaip planetos matomos iš zondo buvimo vietos, galime nustatyti ir pastarąją.
Svarbiausia, šiems skaičiavimams pakanka vos vienos planetų nuotraukos, o reikalingi skaičiavimo resursai tokie nedideli, kad pakaktų procesoriaus, telpančio net į mažytį palydovą-kubiuką.
Kiti analogiški šiuo metu vystomi metodai remiasi pulsarų stebėjimu, bet tam reikia radijo imtuvų ir daugybės stebėjimų, o jų trianguliavimui reikalingi daug didesni skaičiavimo resursai.
Aišku, naujasis metodas irgi nėra visiškai paprastas – svarbu identifikuoti, kurie nuotraukoje matomi taškeliai yra planetos, kurios būtent tai planetos ir taip toliau. Bet viską padaryti įmanoma: tyrėjai išbandė algoritmą, išsiųsdami jį į virtualią kelionę nuo Žemės iki Marso.
Kelionės pabaigoje algoritmas zondo padėtį nustatė 2000 kilometrų tikslumu, o greitį – 0,5 km/s tikslumu. Tai tikrai neprastas rezultatas, nors ir nepakankamas, pavyzdžiui, nusileidimui ant Marso valdyti. Sekantis vystymo žingsnis – išbandyti algoritmą realiame zonde.
Tyrimo rezultatai skelbiami „arXiv“.